Hugo Locurcio
2a962929f3
Update demo files for Godot 4.2.1 (#1013)
Hugo Locurcio
2a962929f3
Update demo files for Godot 4.2.1 (#1013)
|
há 9 meses atrás | |
|---|---|---|
| .. | ||
| addons | há 9 meses atrás | |
| fps | há 9 meses atrás | |
| model | há 9 meses atrás | |
| screenshots | há 3 anos atrás | |
| README.md | há 4 anos atrás | |
| button_change_scene.gd | há 1 ano atrás | |
| default_env.tres | há 2 anos atrás | |
| fabrik_ik.tscn | há 2 anos atrás | |
| icon.webp | há 1 ano atrás | |
| icon.webp.import | há 1 ano atrás | |
| look_at_ik.tscn | há 2 anos atrás | |
| project.godot | há 9 meses atrás | |
| skeleton_ik.tscn | há 2 anos atrás | |
| skeleton_ik_runner.gd | há 2 anos atrás | |
| target_from_mousepos.gd | há 2 anos atrás | |
{kind=link}
{kind=link}
README.md
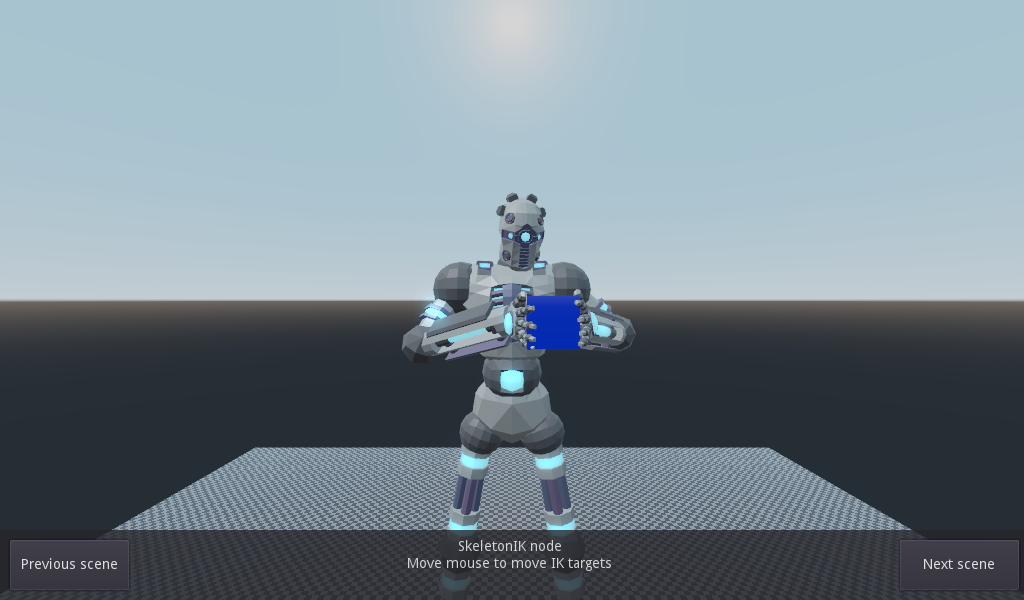
3D Inverse Kinematics
This is an example of different Inverse Kinematic algorithms implemented in Godot. It contains four scenes, showing different ways they can be used.
Language: GDScript
Renderer: GLES 3
Check out this demo on the asset library: https://godotengine.org/asset-library/asset/523
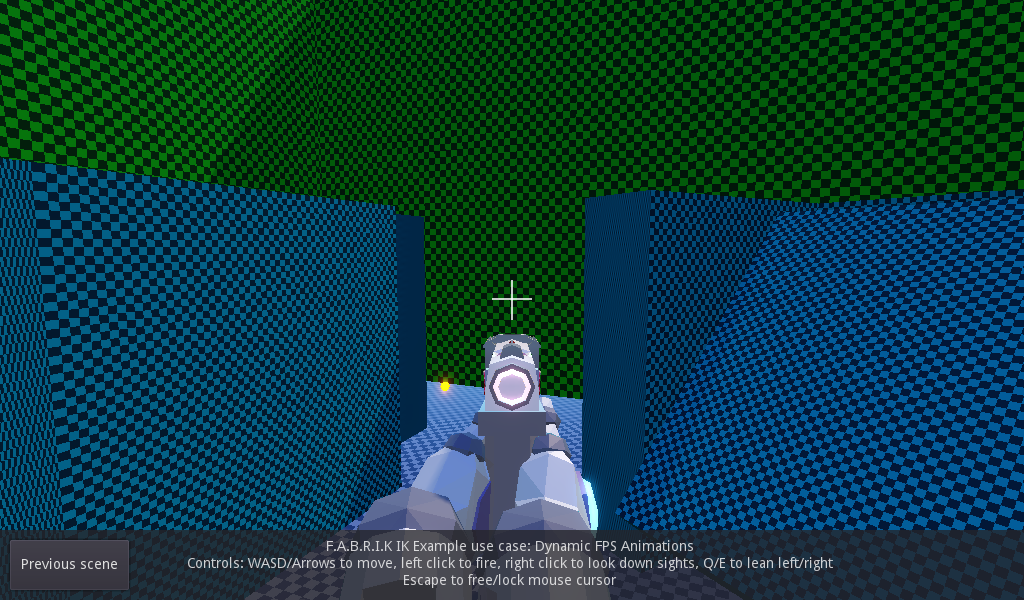
How does it work?
This demo shows how to implement IK using two different methods. One uses the
SkeletonIK
node which is built into Godot. The other method is using a script
called FABRIK (inside of the SADE plugin) for inverse kinematics.
Screenshots